Tohme
Project Description
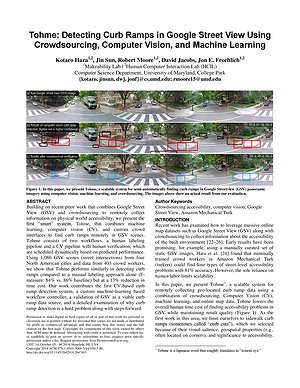
Tohme combines machine learning, computer vision (CV), and custom crowd interfaces to find curb ramps remotely in GSV scenes. Tohme consists of two workflows, a human labeling pipeline and a CV pipeline with human verification, which are scheduled dynamically based on predicted performance. Using 1,086 GSV scenes (street intersections) from four North American cities and data from 403 crowd workers, we show that Tohme performs similarly in detecting curb ramps compared to a manual labeling approach alone (F-measure: 84% vs. 86% baseline) but at a 13% reduction in time cost. Our work contributes the first CV-based curb ramp detection system, a custom machine-learning based workflow controller, a validation of GSV as a viable curb ramp data source, and a detailed examination of why curb ramp detection is a hard problem along with steps forward.
This project is part of our larger research agenda in combining crowdsourcing, computer vision, and online map imagery to transform how we collect data about street-level accessibility.
- Funding
-

Publications

An Initial Study of Automatic Curb Ramp Detection with Crowdsourced Verification using Google Street View Images
Poster Proceedings of HCOMP 2013

Exploring Early Solutions for Automatically Identifying Inaccessible Sidewalks in the Physical World using Google Street View
Workshop Proceedings of HCIC2013 Workshop 2013
Related Projects
![Illustration of a multi-story indoor house layout used in the CapNav benchmark. The diagram asks: “Can [AGENT] go from the basement foyer to the top floor rest area?” The basement foyer (START) is at the bottom left, and the top floor rest area (END) is at the top right. Colored paths show different possible routes through labeled areas including Garage, First Floor Hallway, and Elevator. Icons on the left represent four agent types: a wheelchair user (allowed, green check), a quadruped robot (allowed, green check), a human (allowed, green check), and a sweeping robot (not allowed, red X). Red X markers and warning labels indicate constraints such as “Cannot go up stairs” and “Cannot operate elevator,” showing how different mobility capabilities affect route feasibility.](/media/projects/images/CapNav-Thumbnail.png.500x300_q85_box-135%2C10%2C2826%2C1627_crop_upscale.png)