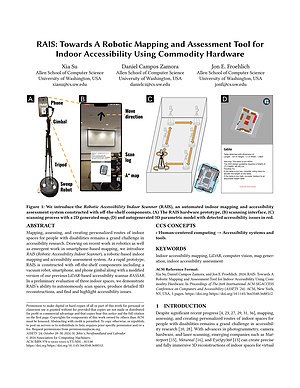
RAIS: Robotic Accessibility Indoor Scanner
Mapping, assessing, and creating personalized routes of indoor spaces for people with disabilities remains a grand challenge in accessibility research. Drawing on recent work in robotics as well as emergent work in smartphone-based mapping, we introduce RAIS (Robotic Accessibility Indoor Scanner), a robotic-based indoor mapping and accessibility assessment system. As a rapid prototype, RAIS is constructed with off-the-shelf components including a vacuum robot, smartphone, and phone gimbal along with a modified version of our previous LiDAR-based accessibility scannar RASSAR. In a preliminary evaluation of three indoor spaces, we demonstrate RAIS’s ability to autonomously scan spaces, produce detailed 3D reconstructions, and find and highlight accessibility issues.
![Illustration of a multi-story indoor house layout used in the CapNav benchmark. The diagram asks: “Can [AGENT] go from the basement foyer to the top floor rest area?” The basement foyer (START) is at the bottom left, and the top floor rest area (END) is at the top right. Colored paths show different possible routes through labeled areas including Garage, First Floor Hallway, and Elevator. Icons on the left represent four agent types: a wheelchair user (allowed, green check), a quadruped robot (allowed, green check), a human (allowed, green check), and a sweeping robot (not allowed, red X). Red X markers and warning labels indicate constraints such as “Cannot go up stairs” and “Cannot operate elevator,” showing how different mobility capabilities affect route feasibility.](/media/projects/images/CapNav-Thumbnail.png.500x300_q85_box-135%2C10%2C2826%2C1627_crop_upscale.png)