Project Description
PI
Student Lead
Mapping, assessing, and creating personalized routes of indoor spaces for people with disabilities remains a grand challenge in accessibility research. Drawing on recent work in robotics as well as emergent work in smartphone-based mapping, we introduce RAIS (Robotic Accessibility Indoor Scanner), a robotic-based indoor mapping and accessibility assessment system. As a rapid prototype, RAIS is constructed with off-the-shelf components including a vacuum robot, smartphone, and phone gimbal along with a modified version of our previous LiDAR-based accessibility scannar RASSAR. In a preliminary evaluation of three indoor spaces, we demonstrate RAIS’s ability to autonomously scan spaces, produce detailed 3D reconstructions, and find and highlight accessibility issues.
Funding
")
Publications
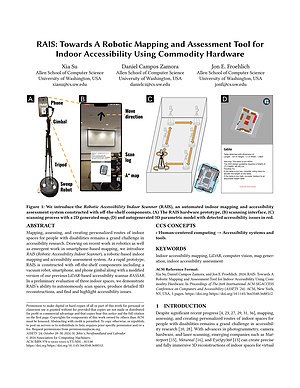
RAIS: Towards A Robotic Mapping and Assessment Tool for Indoor Accessibility Using Commodity Hardware
Proceedings of ASSETS 2024 To Appear | Acceptance Rate: 66.7% (58 / 87)
PDF | doi | Citation | RAIS: Robotic Accessibility Indoor Scanner
Related Projects